Daten
Zählschleifendaten
An den meisten Ampel-Kreuzungen im Stadtgebiet von Ingolstadt sind in den Fahrspuren Verkehrsdetektoren in Form von Induktionsschleifen (siehe Abb. 2) eingelassen. Diese erkennen ein darüberfahrendes Fahrzeug und meldet dieses an die Ampelsteuerung. Das Ampelprogramm nutzt diese Informationen zur bedarfsgerechten Regelung der Kreuzung.
Daneben findet eine zentrale Ablage der Zählereignisse auf dem Verkehrsserver der Stadt Ingolstadt statt. Im Abstand von 15 Minuten wird ein Zählwert je Detektor für den Zeitraum auf dem Server abgelegt. Die Daten liegen jedoch auf zugangsbeschränkten Server nicht in einer Form vor, die eine einfache Handhabe und Weiterverarbeitung ermöglichen.
Durch die Arbeit im Forschungsprojekt SAVeNoW werden die Daten regelmäßig vom Verkehrsserver der Stadt abgerufen, bereinigt, formatiert und in den beschriebenen SensorThingsAPI-Server hochgeladen. Außerdem wird ein aggregierter Zählwert für die gesamte Kreuzung berechnet. Neben der Vorverarbeitung der Daten werden diese mit Metainformationen und Georeferenzen zu den Detektorpositionen angereichert.
Nach dem Hochladen sind sie über die standardisierte Schnittstelle abrufbar. Aktuell besteht eine Verzögerung von 3-4 Minuten nach Ablauf der Zählperiode, bis die Daten über die Schnittstelle erreichbar sind.
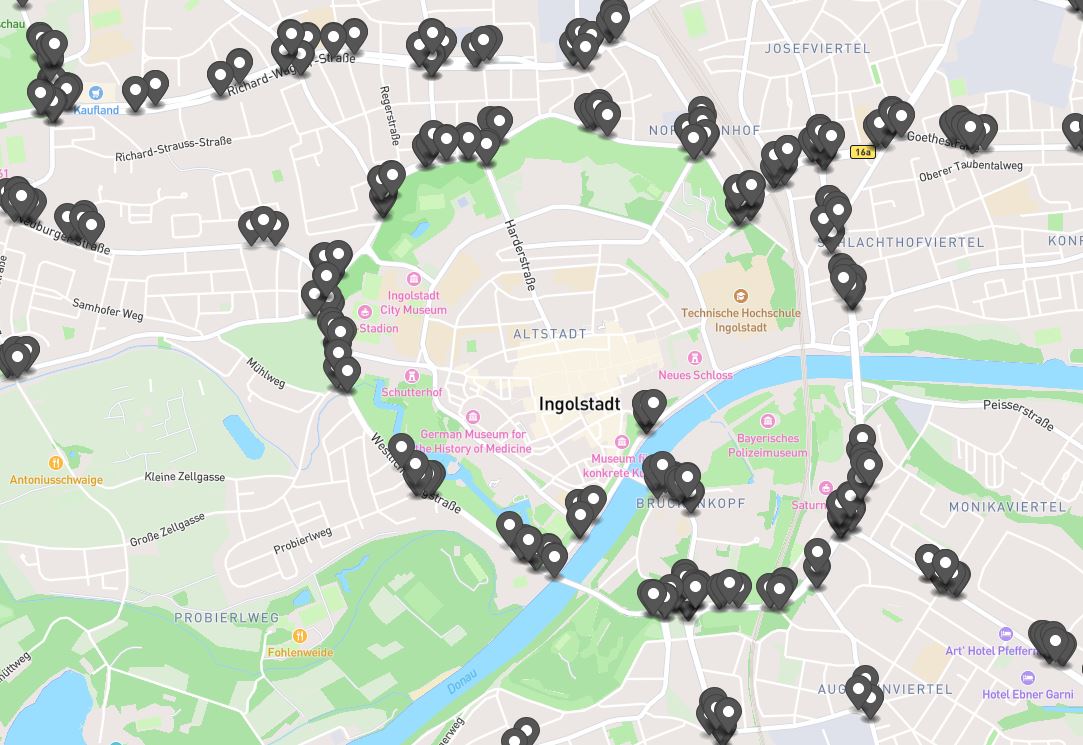
Abb. 2 Positionen der Schleifendetektoren in Ingolstadt.
Wetterdaten
Neben den Daten der Induktionsschleifen wird die SensorThingsAPI-Server Instanz auch für die Daten von einen Wettermessstation aus dem SAVeNoW Forschungsprojekt genutzt.
Messaufbau
Bei der Erfassung der Wetterdaten im Rahmen von SAVeNoW steht die Untersuchung der Witterungseinflüsse auf optische Sensoren im Vordergrund. In diesem Sinne werden vor allem Niederschläge (Regen, Schnee, Hagel) sowie die Stärke der Sonneneinstrahlung sehr präzise mit einer Zykluszeit von nur 60 s im Feld gemessen. Die Wettermessstation enthält dafür:
Ein Thies Laser Disdrometer für die hochpräzise Erfassung der aktuellen Niederschlagsrate, sowie des Niederschlagstyps. Weiterhin werden die meteorologische Sichtweite sowie die Verteilung der Partikel-Geschwindigkeit und -Größe des Niederschlags gemessen.
Ein Thies Hygro-Thermometer, welches Umgebungstemperatur und Luftfeuchte misst.
Ein Thies Anemometer, welches die Windgeschwindigkeit erfasst.
Ein Thies Windrichtungssensor, der die Windrichtung ermittelt.
Ein Thies Pyranometer, welches die globale Bestrahlungsstärke der Sonne (W/m2) in einem Spektrum von 380-2800nm misst.
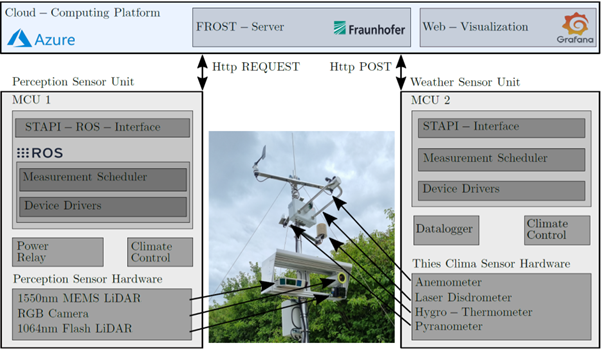
Abb. 3 Messaufbau zur Wetter- und LiDAR-Datenerfassung im Feld.
Neben den gemessenen Größen wird auf Basis der lokalen Zeit, sowie den genauen Standortkoordinaten des Sensors, der genaue Sonnenstand berechnet. Der generelle Messaufbau ist in Abb. 3 dargestellt. So werden die Wetterdaten (rechts) von einem Raspberry-Pi 4 (MCU 2) aggregiert und mittels Wifi-Anbindung im Minutentakt in das Backend der Sensor Things API gespeist. Diese Daten werden unter anderem von einem Sensormast mit fest installierten LiDAR Sensoren (links) abgefragt, um die Performanz der Sensoren mit Hinblick auf die aktuell vorliegenden Wetterbedingungen zu untersuchen und diese zu modellieren.
Datenstruktur
Genaue Informationen zu den einzelnen Messgrößen, wie deren Struktur,
Einheit und Beschreibung, können den Datastreams, zum entsprechenden Thing Weatherstation
entnommen werden (siehe auch Datenmodell).
Referenzen
Kettelgerdes, M. Elger, G. (2023): In-field Measurement and Methodology for Modeling and Validation of Precipitation Effects on Solid-State LiDAR Sensors. IEEE J. Radio Freq. Identif. (IEEE Journal of Radio Frequency Identification). DOI: 10.1109/JRFID.2023.3234999